Spiderbot
[ SYS.DATE: ] | STATUS:
LOGGED
> EXTERNAL_LINKS:
>
[ Full Project ]
> LESSONS_LEARNED:
- > Real-world controlling
- > Working with li-ion batteries
- > See inverse kinematics in practice
- > Soldering on a perfboard
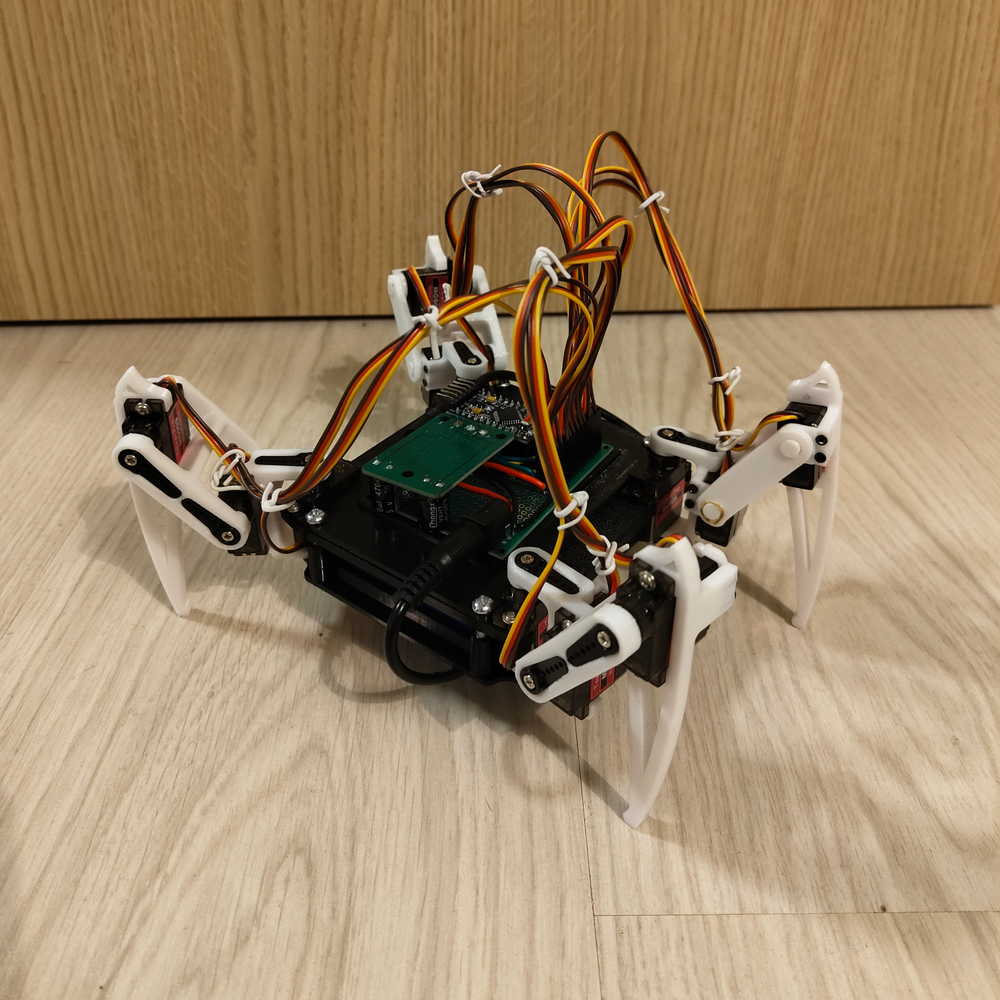
I have always been fascinated by spider-robots so I made my own. Creating this involved making my own circuit on a perfboard, 3D printing all the parts and putting it all together with a good controlling algorithm. The spiderbot has 4 legs which have a total of 12 servos inside them.
The circuit starts with a 12.6V Li-Ion battery which goes into a DC/DC voltage converter to convert it to 5 Volts. These 5 Volts go into the Arduino Pro board and into the 12 MG90S servos. The arduino controls the servos using PWM through it’s digital pins.
The Arduino C++ code uses the Servo.h library to control the servos (handles the PWM signal generation) and FlexiTimer2 to move smoothly between position interpolation logic.

